

Последние записи
- Как в Python+Selenium webdriver открыть новую вкладку в уже открытом браузере?
- Lazarus, проверка существования строки таблице
- BASM и record, обращение к полям записи
- Web PHP Framework Symfony
- Относительный путь для вывода картинки на html странице
- Массовое открытие гиперссылок в браузере
- Скопировать значение строки из таблицы в textarea
- Рамки для страниц отчетов
- Вывод StdOut консоли в TMemo
- Чтение из файла большого размера (нехватка памяти)

Интенсив по Python: Работа с API и фреймворками 24-26 ИЮНЯ 2022. Знаете Python, но хотите расширить свои навыки?
Slurm подготовили для вас особенный продукт! Оставить заявку по ссылке - https://slurm.club/3MeqNEk

Online-курс Java с оплатой после трудоустройства. Каждый выпускник получает предложение о работе
И зарплату на 30% выше ожидаемой, подробнее на сайте академии, ссылка - ttps://clck.ru/fCrQw
25th
Май
 Поиск пути
Поиск пути
Posted by bullvinkle under Журнал, Статьи
Многие начинающие игроделы сталкиваются с проблемой автоматической прокладки маршрутов ботами на карте. Основных проблем две – генерация вейпоинтов и прокладка по ним кратчайшего (либо оптимального по другим параметрам) маршрута. Данная статья, делает небольшой экскурс по реализации алгоритма поиска кратчайшего пути по ранее установленным вейпоинтам (на основе алгоритма Дейкстры).
ПОИСК ПУТИ
На пути постижения мудрости не надо бояться, что свернёшь не туда.
Пауло Коэльо
Автор Utkin www.programmersforum.ru
Прокладка маршрута называется навигацией. Она бывает двух видов: автономная – когда объект (бот) самостоятельно прокладывает маршрут из одной точки карты в другую, запоминает его индивидуально (либо в общем, хранилище маршрутов для одной группы юнитов), и предварительная – когда маршруты уже проложены во время проектирования карты (опять же автоматически или программистом), или же на этапе загрузки карты игрового мира. Маршрут обычно представляет собой некоторую совокупность точек (или их координат) со связями между ними, то есть это маршрут, проложенный на графе. Сами точки называются вейпоинтами – это углы (или вершины) графа. Соответственно подавляющее большинство алгоритмов поиска пути есть алгоритмы по работе с графами.
Краткий экскурс…
Наиболее простой способ – это проложить ключевые точки уже на карте (в момент ее проектирования), а уже на основании имеющейся информации вырабатывать маршрут в зависимости от игрового процесса. Как уже было указано выше, маршрут имеет не только точки, но также и взаимосвязи между ними. В самом простом случае это ссылки на те точки, на которые можно попасть из данной точки, а также отношения между ними (например, это может быть время прохождения или расстояние между точками). В случае если вейпоинты генерируются до игры (во время разработки карты, а не ботом во время игрового процесса) отношения также должны быть уже рассчитаны (например, как расстояния между доступными точками). Также иногда некоторые маршруты уже изначально заложены и бот «знает» куда идти, но такой вариант должен комбинироваться с алгоритмами самостоятельной выработки маршрута по ряду причин – это делает игровой процесс более динамичным, карта может изменять свои параметры (например, произошел обрыв моста, тогда связи, отношения между двумя точками разрушаются, и требуется новый путь) и т.д.
Особенностью игрового мира является тот факт, что любая ситуация может быть промоделирована, поэтому для простых карт (имеющих малое количество вейпоинтов) можно просчитать оптимальные маршруты до каждой точки на этапе проектирования карты. Для карт, имеющих большое количество вейпоинтов, можно просчитать оптимальные маршруты только для тактически важных точек (какие это точки определяет разработчик), например, от базы до основных ресурсов или от одной лестницы до другой и т.д., остальные маршруты все равно придется просчитывать во время игры.
Предварительный просчет точек осуществлен, например, в игре StarСraft. Это видно если отправить рабочего добывать ресурсы, он смело перемещается через туман войны и по неисследованной области, способен находить подъемы на другой уровень плоскости и сразу определять местоположение моста.
Алгоритм Дейкстры
Этот алгоритм находит кратчайшее расстояние от одной из вершин графа до всех остальных.
Сначала рассмотрим граф без применения алгоритма Дейкстры, это упростит понимание алгоритма в дальнейшем. Для удобства восприятия обозначим каждую вершину идентификатором, пусть это будет номер вершины (порядок нумерации на графе значения не имеет). В качестве отношения между точками возьмем расстояние. Получается, точка имеет: идентификатор, список точек, куда можно попасть из данной точки и расстояния до каждой из доступных точек.
Вот образец графа (см. рисунок 1):
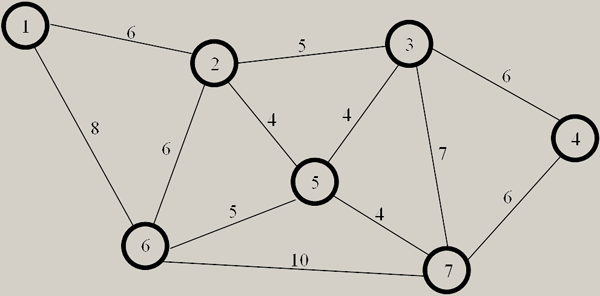
Рис. 1. Образец типичного графа
Представьте, что нам нужно попасть из точки 1 в точку 5. Сколько имеется путей достижения точки 5? Давайте посчитаем:
а) 1-2-5
б) 1-2-6-5
в) 1-6-5
г) 1-6-2-5
Итого четыре маршрута. Вычислим расстояния по каждому маршруту (суммированием расстояний между точками). Вот расстояния между точками:
а) 1-2 расстояние 6
б) 2-5 расстояние 4
в) 2-6 расстояние 6
г) 6-5 расстояние 5
д) 1-6 расстояние 8
е) 6-2, он же 2-6 расстояние 6
Общее расстояние всего маршрута:
а) 1-2-5 расстояние 6+4=10
б) 1-2-6-5 расстояние 6+6+5=17
в) 1-6-5 расстояние 8+5=13
г) 1-6-2-5 расстояние 8+6+4=18
Самый оптимальный (для нашего примера) является путь а) расстояние всего 10. Если же будут обнаружено два и более маршрутов, имеющих одинаковую длину, то выбирается, как правило, первый (либо заранее продумано, какой из маршрутов, лишь бы выбор был осуществлен).
Также нужно обратить внимание, что на первый взгляд маршруты б) и г) равны (казалось бы, от перемены мест слагаемых сумма не меняется), однако следует не забывать, что идентификаторы здесь не несут математического смысла это просто имена точек. Таким же образом мы могли бы назвать и a, b, c и т.д. Операции идут над расстояниями, а суммы пар расстояний (1-2; 2-6) и (1-6; 2-6) не эквивалентны (не равны) между собой.
Теперь сам алгоритм. Он предназначен для поиска всех наикратчайших путей от указанной вершины до всех остальных. Изначально расстояния нам не известны, поэтому будем считать, что они равны максимально возможному расстоянию до каждой из вершин (точек) графа (кроме исходной, до нее расстояние естественно равно нулю). Далее, необходимо отмечать рассмотренные точки графа (чтобы не повторяться)…
Перейдем к алгоритму
Итак, рассмотрим действие алгоритма для первой вершины нашего графа. Вершина 1 имеет отношения (в дальнейшем будем считать отношения просто расстояниями между вершинами графа) с вершинами 2 и 6. Ближайшей точкой будет являться точка 2, поскольку расстояние до нее меньше и составляет 6 единиц (в примере неважно каких единиц, в игре это могут быть условные единицы реальных км, м и т.д., единицы местоположения юнита на карте, число пикселей с привязкой к координатной сетке области отображения и т.д.). Считаем точку 1 пройденной, поскольку нам известны кратчайшие расстояния до точек 2 и 6.
Следующей рассмотрим точку 2 (потому что она ближе к 1 точке). Для нашего графа соседями точки 2 являются 1, 6, 5 и 3. Точку 1 мы рассматривать не будем, поскольку уже было отмечено, что она была просмотрена ранее. Вот расстояния:
. до точки 6 расстояние 6;
. до точки 5 расстояние 4;
. до точки 3 расстояние 5.
Отсюда следует, что ближайшей точкой к вершине 2 будет точка 5, поскольку расстояние до нее минимально, по сравнению с вершинами 6 и 3.
На данном этапе:
. расстояние до точки 1 составляет 0;
. расстояние до точки 2 составляет 6;
. расстояние до точки 5 составляет 10 (6+4);
. маршрут до точки 5 следующий – 1-2-5 (и никакой другой до данной точки более не рассматривается);
. следующей точкой будет являться точка 5;
. точка 2, также как и точка 1 считается отмеченной и больше не рассматривается;
. расстояние до точки 6 (маршрут 1-6) равен 8 (0+8), а не 12 (маршрут 1-2-6, расстояние 6+6), поскольку хоть точка 6 и не отмечена, но текущее расстояние до нее уже было вычислено и оно менее текущего (не забываем, что изначально расстояние до каждой точки равно максимально возможному для данного графа).
Собственно этих данных достаточно для того, чтобы выполнить следующие итерации для всех оставшихся точек нашего графа. Несмотря на такое простое описание реализации алгоритма Дейкстры может оставаться трудной, если не представлять, в виде каких структур выражать работу алгоритма. Вот классический вариант:
Представление точек графа
Граф можно представлять многими способами, например, в виде таблицы смежности (ru.wikipedia.org/wiki/Список_ребер). Такой способ представления удобен с математической точки зрения, но абсолютно не удобен с практической. Например, точку можно представить как ее координаты и набор отношений (где отношение можно представить как пару – указатель на точку-соседа и расстояние до точки-соседа). Если отношение представляет собой расстояние между двумя точками в данной системе координат, то его можно вычислять автоматически по формуле вычисления расстояния между двумя точками (школьный курс геометрии), при этом расстояние для системы координат с числом осей более двух вычисляется аналогично по обобщенной формуле. Собственно совокупность точек графа и будут являться самим графом.
Отмеченные точки графа
Здесь необходимо отмечать те точки графа, которые были пройдены во время работы алгоритма, чтобы не проходить их повторно. Считаю, эти данные должны лежать отдельно от точек графа, потому как такая информация собственно к графу отношения не имеет (а вот к алгоритму самое прямое).
Таблица кратчайших расстояний
Согласно алгоритму изначально расстояние до точек должно представляться максимально возможным расстоянием (за исключением стартовой, до нее расстояние минимально – 0). Затем эти расстояния заполняются в процессе выполнения алгоритма. Также эти расстояния нужны для сравнения имеющихся и предлагаемых расстояний (расстояние до точки 6 для нашего примера).
Маршруты от начальной до остальных точек
Собственно сами маршруты, по которым в дальнейшем будут осуществляться перемещения. Вообще алгоритм Дейкстры не предназначен для поиска маршрутов (только расстояний), но его работа построена таким образом, что формирование маршрута по данному алгоритму не представляет никаких сложностей (в момент оценки и внесения в таблицу кратчайшего расстояния).
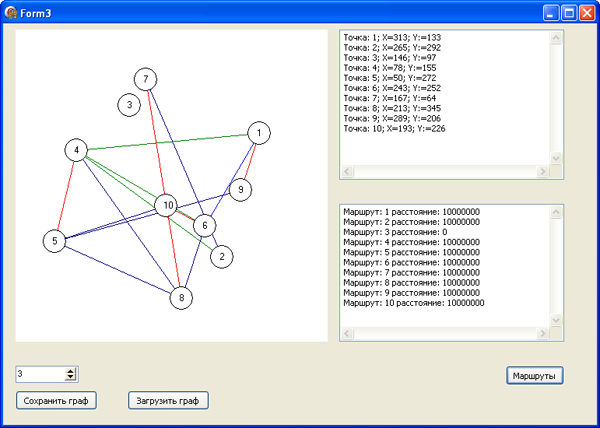
Рис. 2. Тестовая утилита
Заключение
Несмотря на кажущуюся сложность данного алгоритма, при четком понимании работы, его реализация очень проста, а скорость работы вполне приемлема для не очень больших графов.
Исходники тестового проекта прилагаются в виде ресурсов в теме «Журнал клуба программистов. Третий выпуск» или непосредственно в архиве с журналом [5].
Ресурсы
. Реализация алгоритма Дейкстры http://plagiata.net.ru/?p=90
. Описание алгоритма Дейкстры http://algolist.ru/maths/graphs/shortpath/dijkstra.php
. Математическое и неформальное описание алгоритма Дейкстры
http://ru.wikipedia.org/wiki/Алгоритм_Дейкстры
. Дополнительные материалы http://borisvolfson.h11.ru/show_article.php?article_id=0000020 и
http://www.excode.ru/art6837p1.html
. Модули и проекты, использованные в статье http://programmersclub.ru/pro/pro3.zip
Это статья из третьего номера журнала “ПРОграммист”.
Скачать его можно по ссылке.
Ознакомиться со всеми номерами журнала.
Обсудить на форуме — Поиск пути
Похожие статьи
Купить рекламу на сайте за 1000 руб
пишите сюда - alarforum@yandex.ru
Да и по любым другим вопросам пишите на почту

пеллетные котлы

Пеллетный котел Emtas
Наши форумы по программированию:
- Форум Web программирование (веб)
- Delphi форумы
- Форумы C (Си)
- Форум .NET Frameworks (точка нет фреймворки)
- Форум Java (джава)
- Форум низкоуровневое программирование
- Форум VBA (вба)
- Форум OpenGL
- Форум DirectX
- Форум CAD проектирование
- Форум по операционным системам
- Форум Software (Софт)
- Форум Hardware (Компьютерное железо)
